

Le mécanisme de Klann est un mécanisme plan conçu pour simuler l'allure d’un animal à pattes et remplacer la roue. Le mécanisme se compose d’une « jambe » qui entre en contact avec le sol, d’une manivelle, de deux culbuteurs, et deux biellettes, tous reliés par des liaisons pivots. Il fut développé par Joe Klann en 1994 comme une extension des courbes de Burmester qui étaient utilisées pour développer les mécanismes à quatre barres à double culbuteurs telles les grues portuaires. Il est classé comme un type de chaîne cinématique de Stephenson type III modifiée.
Les proportions de chacune des liaisons dans le mécanisme sont définies pour optimiser le mouvement linéaire du pied lors de la moitié de la rotation de la manivelle. Le reste de la rotation de la manivelle permet au pied d' être relevé à une hauteur prédéterminée avant de revenir à la position de départ et répéter le cycle. Deux mécanismes couplés ensemble à la manivelle et déphasés d’un demi-cycle permettent au châssis d'un véhicule de se déplacer parallèlement au sol.
Le mécanisme de Klann offre un grand nombre d’avantages aux véhicules marchants, sans certaines de leurs limites. Ils peuvent franchir des bordures, monter des escaliers, ou se déplacer dans des zones qui ne sont actuellement pas accessibles aux véhicules à roues, mais ne nécessitent pas de contrôle par microprocesseur ou de multiples mécanismes d'actionneurs. D’un point de vue technologique, il s'insère entre les dispositifs de marche et ceux à essieux à roues motrices.
Mécanisme
La cinématique du mécanisme de Klann se base sur des liaisons mécaniques qui donnent le mouvement relatif à chacune des barres. Il convertit le mouvement de rotation en un mouvement linéaire, et ressemble à la marche des animaux.

Cette animation montre le fonctionnement d'un mécanisme de Klann.


Comparaison avec le mécanisme de Jansen

Le mécanisme de Klann utilise six barres par jambe, alors que le mécanisme de Jansen, développé par Theo Jansen, utilise huit barres par jambe, avec un degré de liberté. Le nombre de barres dans le mécanisme Jansen est plus grand que dans le mécanisme Klann, et est plus coûteux.
Le mécanisme de Klann peut marcher sur des routes non planes et sur des surfaces inégales et escarpées. La conception du mécanisme de Klann comporte moins de liaison pour le mouvement. Le frottement entre les jambes et le sol est nécessaire pour le mouvement, faute de quoi elles glisseront.
Exemple de jambe
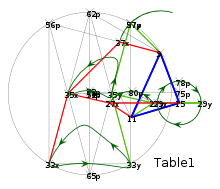
Dans le brevet américain 6260862, il y a un ensemble de coordonnées pour une jambe. Exemple :
| Point | X | Y | Description |
|---|---|---|---|
| Points fixes | |||
| 9 | 1,366 | 1,366 | Premier axe du culbuteur |
| 11 | 1,009 | 0,574 | Second axe du culbuteur |
| 15 | 1,599 | 0,750 | Manivelle |
| Position de foulée au sol complétement détendue | |||
| 27X | 0,741 | 0,750 | Articulation du coude |
| 29x | 1,331 | 0,750 | Manivelle |
| 33x | 0,000 | 0,000 | Pied |
| 35x | 0,232 | 0,866 | Articulation du genou |
| 37x | 0,866 | 1.500 | Articulation de la hanche |
| Position de démarrage à terre | |||
| 27Y | 1,277 | 0,750 | Articulation du coude |
| 29y | 1,867 | 0,750 | Manivelle |
| 33y | 1,000 | 0,000 | Pied |
| 35y | 0,768 | 0,866 | Articulation du genou |
| 37y | 1,000 | 1,732 | Articulation de la hanche |
Voir aussi
- Roue
- Liaison (mécanique)
- Mondo spider
- Mécanisme de Jansen
- Cheval de Tchebychev et mécanisme lambda de Tchebychev
- Mécanisme à jambes
Références
Liens externes
- [vidéo] Klann Linkage In Phun sur YouTube, animation montrant les capacités de grimpe d'un mécanisme
- [vidéo] Legs, mk2 sur YouTube, vue de coté d'un mécanisme en mouvement
- [vidéo] Son of Mr Crabby - CamBam made Klann linkage walking crab robot sur YouTube
- « Mechanicalspider »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?)
- Mechanisms101
- Araignée Mondo
- « Bête marchante »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?)
- Crabfu
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Klann linkage » (voir la liste des auteurs).